Projects
Contents
Extended Kalman Filter on Legged Robot
Robot Localization and Mapping
Modeling Wheel Locomotion in Granular Media using 3D Resistive Force Theory and Sand Deformation Simulator

The 3D Resistive Force Theory (3D-RFT) divides the intruder into segments and the net force of the body can be approximated by the linear superposition of the local stress at each segment.
In this paper, we apply the 3D-RFT method to rover wheel models and perform experiments for two different wheels in diverse slip-ratio and slip-angle environment profiles. To better capture the sand dynamics, we introduce a simple sand dynamics simulator to model the soil surface and combine it with 3D-RFT. The detail code can be found here
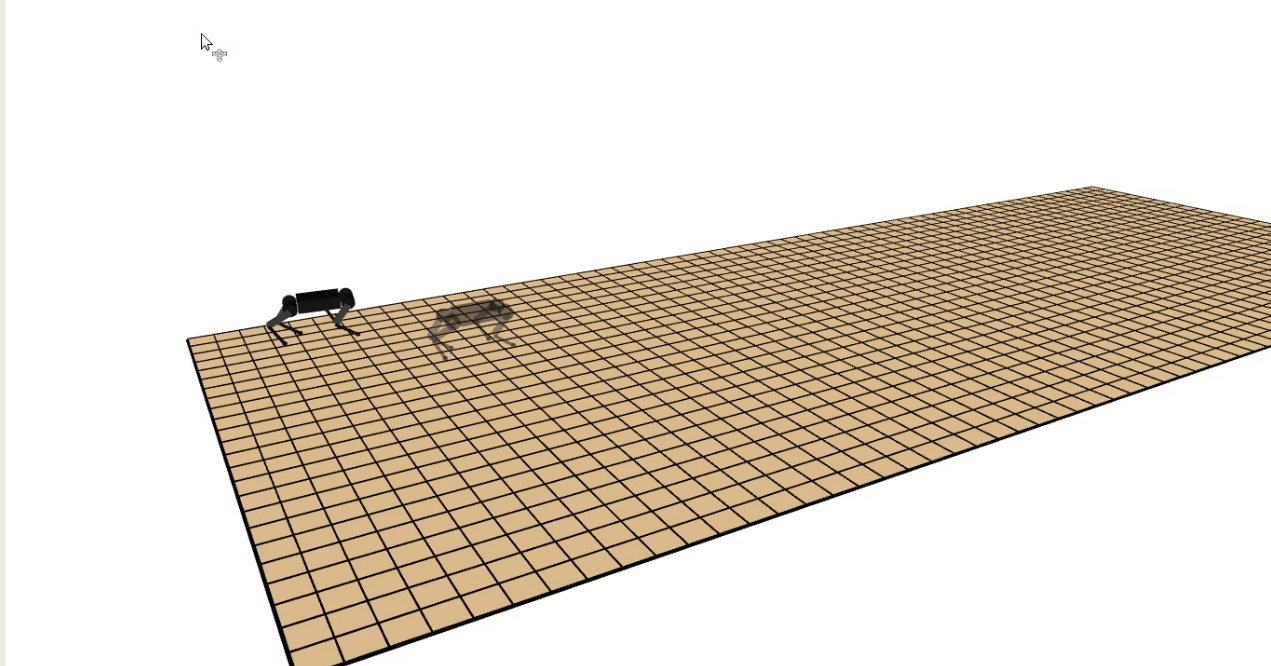
Extended Kalman Filter on Legged Robot
I am currently focusing on implementing a legged robot state estimator on a quadruped robot. The detail code can be found here 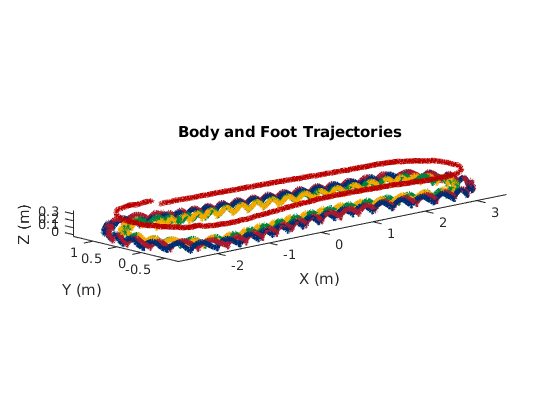
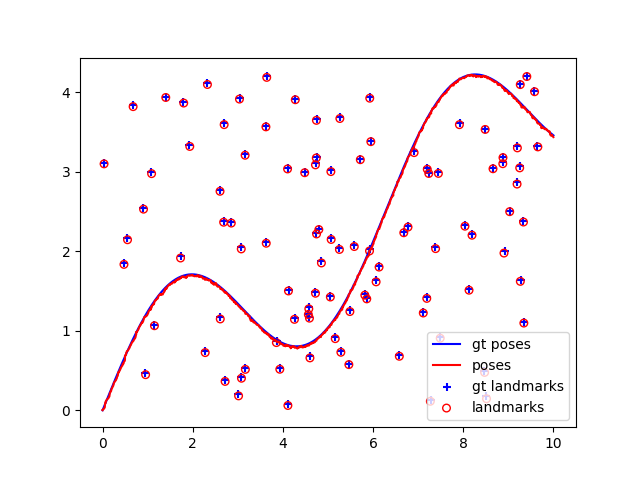
Robot Localization and Mapping
Class projects of CMU RI 16833 which we implemented particle filters, EKF, Linear and Non-Linear least squares problem, and point-based fusion.

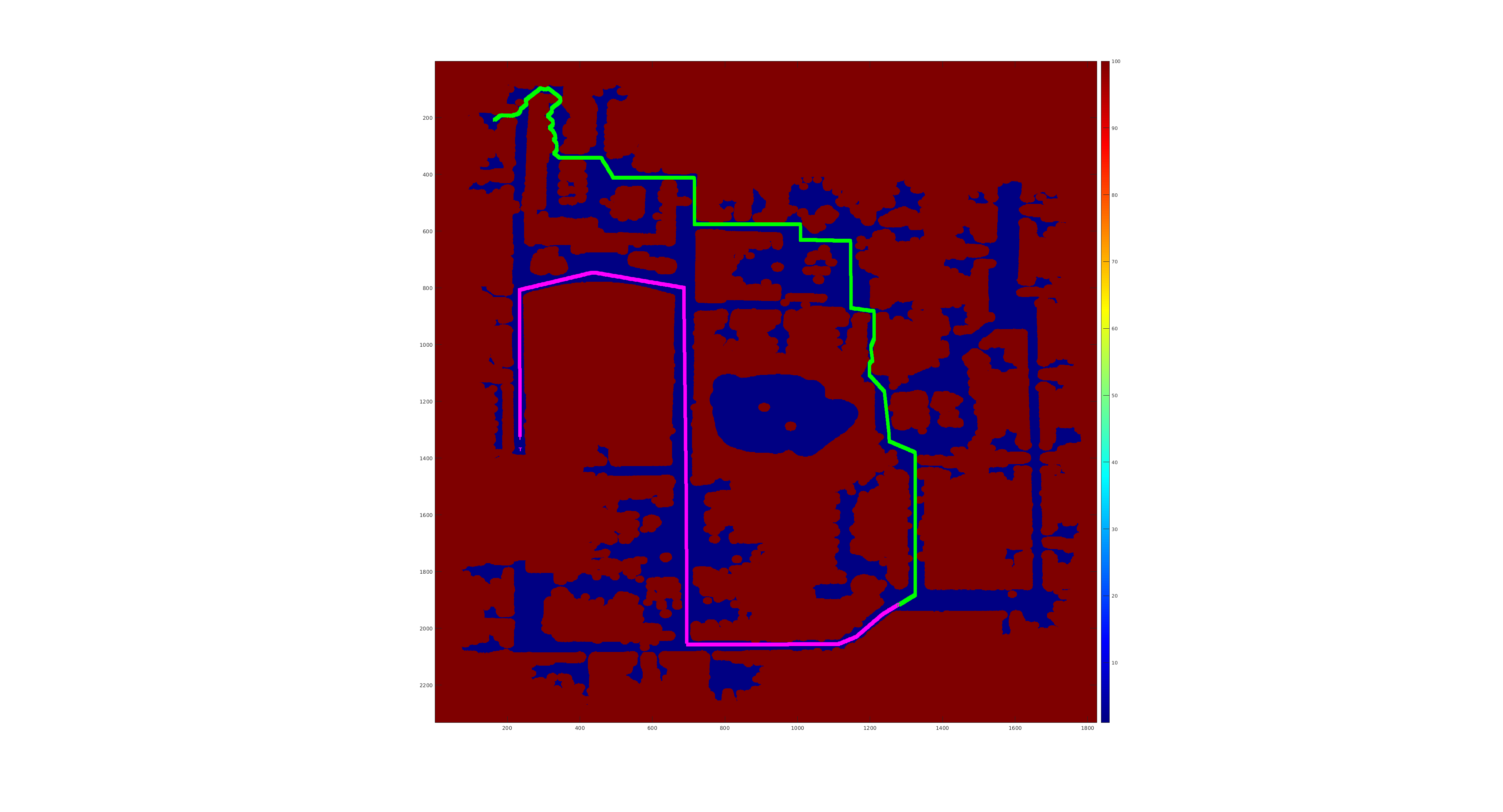
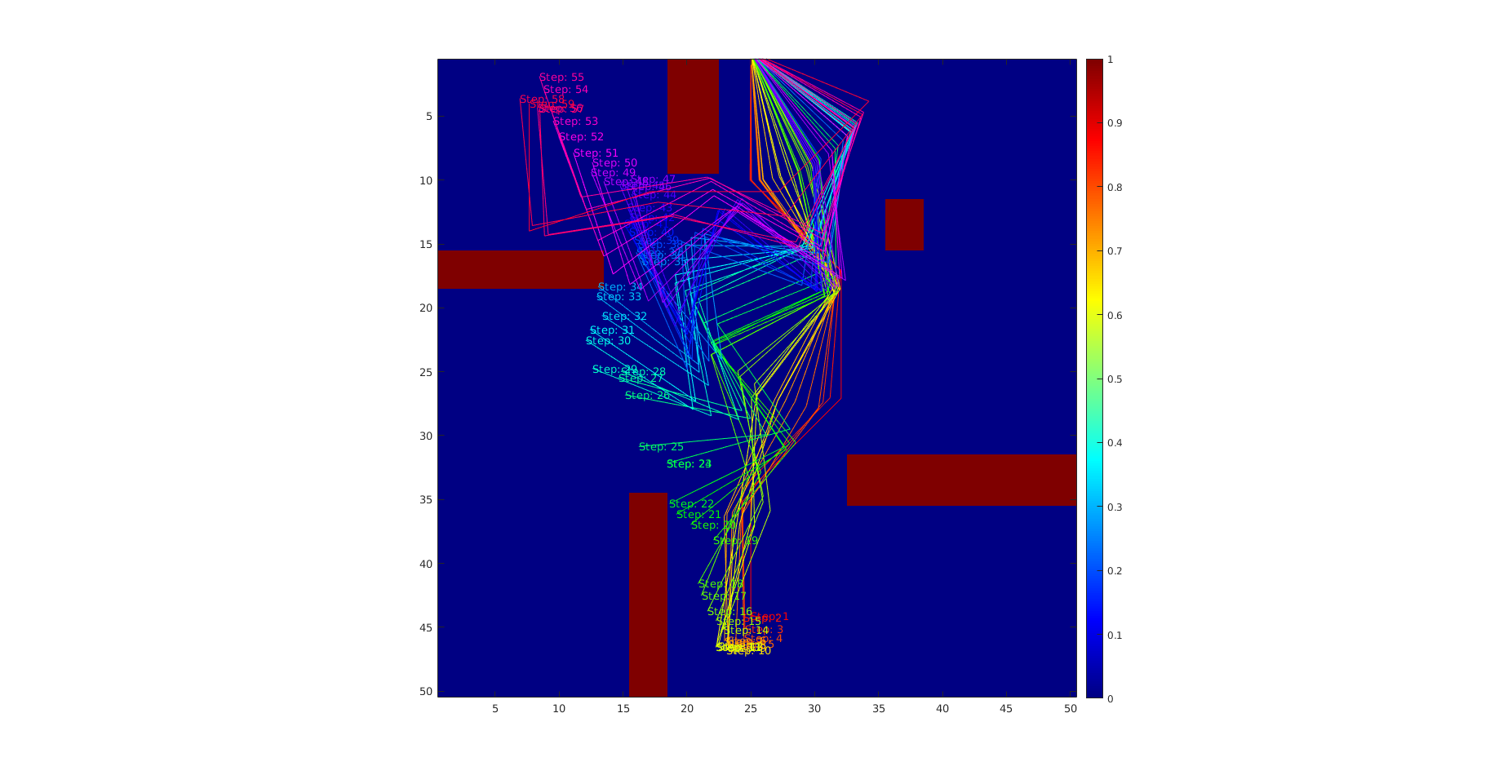
Robot Path Planning
Class project of CMU RI which we implemented RRT, RRT, A, etc. algorithms.